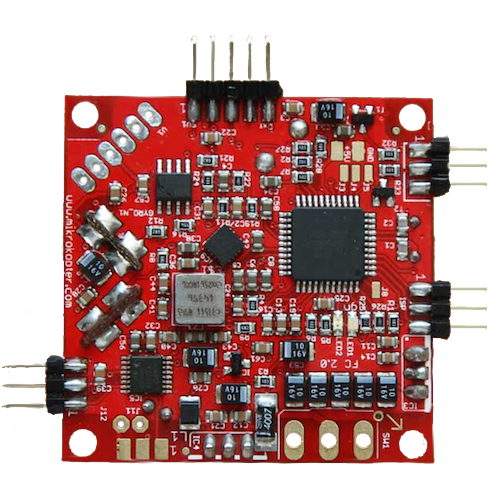
MK FlightCtrl V2.0 (alias FlightCtrl ME)
| Attribute | Value |
|---|---|
| Internal Sensors | 3-axis gyro, accelerometer, barometer |
| External Sensors | Navigation board with GPS (uBlox LEA-6H), magnetometer |
| Processor | ATMEGA644 @20MHz |
| Sensors | GyroScope ADXRS610, ACC: LIS3L02AS4, Presure: MPX4115 |
| Telemetry | Jeti and MK-Wi.232 at 868MHz at 32 mW |
| Weight, Dimensions | 38g, 81.5 x 50 x 15.5 mm |
| Logging | MicroSD card on external navigation board |
| Connection Brushless-Control | I2C bus |
| GCS | MikroKopter (closed source) |
| Special features | Telemetry over Jeti. |
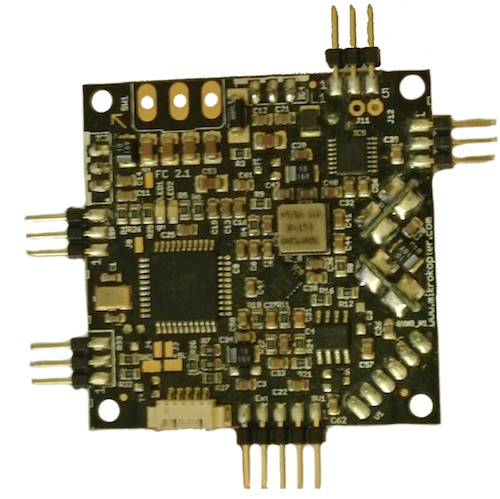
MK FlightCtrl V2.1
| Attribute | Value |
|---|---|
| Internal Sensors | 3-axis gyro, accelerometer, barometer |
| External Sensors | Navigation board with GPS (uBlox LEA-6H), magnetometer |
| Processor | ATMEGA1284P |
| Sensors | GyroScope ADXRS610 (ev ADXRS620), ACC: LIS3L02AS4, Presure: MPX4115 |
| Telemetry | Jeti and MK-Wi.232 at 868MHz at 32 mW |
| Weight, Dimensions | 38g, 81.5 x 50 x 15.5 mm |
| Logging | MicroSD card on external navigation board |
| Connection Brushless-Control | I2C bus |
| GCS | MikroKopter (closed source) |
| Special features | Jeti over Jeti. |
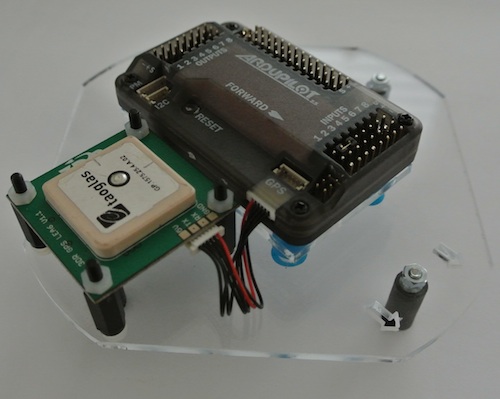
APM 2.5 from 3drobotics
| Attribute | Value |
|---|---|
| Operating-System | ArduCopter based on Arduino |
| Internal Sensors | 3-axis gyro, accelerometer, magnetometer, barometer |
| External Sensors | GPS (uBlox LEA-6H), voltage and current Sensor |
| Processor | Atmel's ATMEGA2560 |
| Telemetry | 433 MHz up to 100mW |
| Special features | Comunication over MAVLINK! Also ulimited waypoint definition. Completely open-source. Arduino compatible. |
APM 2.6 from 3drobotics
| Attribute | Value |
|---|---|
| Operating-System | ArduCopter based on Arduino |
| Internal Sensors | 3-axis gyro, accelerometer, barometer |
| External Sensors | GPS (uBlox LEA-6H), magnetometer, voltage and current Sensor |
| Processor | Atmel's ATMEGA2560 |
| Telemetry | 433 MHz up to 100mW |
| Logging | Onboard 4 MP Dataflash chip and on GCS |
| Connection Brushless-Control | 3 pin PPM |
| GCS | QGroundcontrol (on all OS), Missionplaner (windows) |
| Special features | Comunication over MAVLINK! Also ulimited waypoint definition. Completely open-source. Arduino compatible. |

Pixhawk from 3drobotics
| Attribute | Value |
|---|---|
| Operating-System | NuttX RTOS |
| Internal Sensors | L3GD20 3-axis gyro, LSM303D 3-axis 14-bit accelerometer MS5611 barometer |
| External Sensors | GPS (uBlox LEA-6H), magnetometer, voltage and current Sensor |
| Processor | 32-bit STM32F427 Cortex M4 core with FPU 168 MHz/256 KB RAM/2 MB Flash |
| Telemetry | 433 MHz up to 100mW |
| Weight, Dimensions | 38g, 81.5 x 50 x 15.5 mm |
| Logging | MicroSD card for long-time high-rate logging |
| Connection Brushless-Control | 3 pin PPM |
| GCS | QGroundcontrol (on all OS), Missionplaner (windows) |
| Special features | Comunication over MAVLINK! Also ulimited waypoint definition. |

HKPilot32 from hobbyking
This is an other Pixhawk clone
| Attribute | Value |
|---|---|
| Operating-System | NuttX RTOS |
| Internal Sensors | L3GD20 3-axis gyro, LSM303D 3-axis 14-bit accelerometer MS5611 barometer |
| External Sensors | GPS (uBlox LEA-6H), magnetometer, voltage and current Sensor |
| Processor | 32-bit STM32F427 Cortex M4 core with FPU 168 MHz/256 KB RAM/2 MB Flash |
| Telemetry | 433 MHz up to 100mW |
| Weight, Dimensions | 33.1g, 81 x 44 x 15mm |
| Logging | MicroSD card for long-time high-rate logging |
| Connection Brushless-Control | 3 pin PPM |
| GCS | QGroundcontrol (on all OS), Missionplaner (windows) |
| Special features | Comunication over MAVLINK! Also ulimited waypoint definition. |
Notes
First tests show an issue with the internal compass. The offsets are too high. So, the prearm check for the compass has to be disabled.Manual fly charaterstics are very good. PixHwak Manual (rev7) APM programming

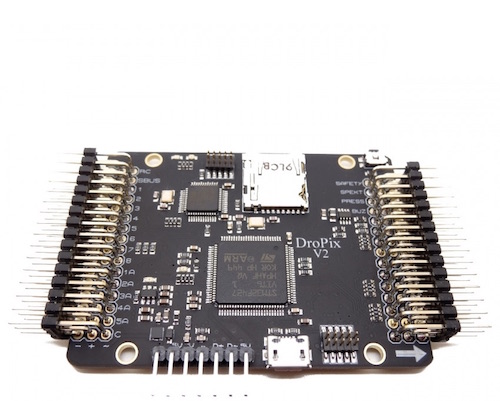
DroPix V2 from drotek.fr
This is an other Pixhawk clone
| Attribute | Value |
|---|---|
| Operating-System | NuttX RTOS |
| Internal Sensors | L3GD20 3-axis gyro, LSM303D 3-axis 14-bit accelerometer MS5611 barometer |
| External Sensors | GPS (uBlox LEA-6H), magnetometer, voltage and current Sensor |
| Processor | 32-bit STM32F427 Cortex M4 core with FPU 168 MHz/256 KB RAM/2 MB Flash |
| Telemetry | 433 MHz up to 100mW |
| Weight, Dimensions | 38g, 67 x 50 mm |
| Logging | MicroSD card for long-time high-rate logging |
| Connection Brushless-Control | 3 pin PPM |
| GCS | QGroundcontrol (on all OS), Missionplaner (windows) |
| Special features | Comunication over MAVLINK! Also ulimited waypoint definition. |
Notes
Not yet tested in an UAV.Somehow the external Compass seems not to be used. But, mybe this is a configuration issue. PixHwak Manual (rev7) DroPix V2 Manual APM programming
cc3D Openpilot Atom Mini
| Attribute | Value |
|---|---|
| Mikrocontroller | STM32 (128KB Flash, 20KB RAM) |
| Internal Sensors | 3-axis gyro and accelerometer (MPU-6000) |
| External Sensors | |
| Voltage Range | |
| Max Tilt Angle | 4 |
| Weight, Dimensions | 7g, 38 x 22 x 12 mm |
| Hovering Accuracy(GPS Mode) | |
| Recommended Transmitter | Up to 6 channels |
| Supported ESC Output | 50Hz, 490Hz and OneShot125 refresh frequency [1], [2] |

DJI NAZA-M
| Attribute | Value |
|---|---|
| Internal Sensors | 3-axis gyro, accelerometer, barometer |
| External Sensors | GPS (NEO 6Q), magnetometer |
| Voltage Range | 7.2V - 26.0 V (recommend 2S ~ 6S LiPo) |
| Max Tilt Angle | 45° |
| Weight, Dimensions | 25g, 45.5mm x 31.5mm x 18.5mm |
| Hovering Accuracy(GPS Mode) | Vertical: ±0.8m, Horizontal: ±2.5m |
| Recommended Transmitter | PCM or 2.4GHz with minimum 4 channels |
| Supported ESC Output | 400Hz refresh frequency |
