| Attribute | Value |
|---|---|
| Name | Artemis |
| Version | 1.2 |
| Typ | Quad |
| Weight without battery | 0.886 kg |
| Motor | 850Kv AC2830-358 |
| Battery | 3S 2200mAh to 4S 3300mAh |
| Propeller | APC 10x47 |
| Flight-Control | APM 2.5 |
| Brushless-Control | ESC 20 Amp from 3D Robotics |
| Position Lights | Yes (12V LED with 4S Lipo) |
| Special feature |
|
| Flight characteristics | Very good in postion hold and following waypoints. Shows some problems with fast descending. |
Summary
Very stable in postion hold (Loiter-Mode) and following waypoints (Auto-Mode). The navigations speed in Auto-Mode is reduced for extra stable flight. Fyling in Loiter-Mode is very easy.Next steps
| 1 | Improve configuration for stabilize mode |
| 2 | Maybe add a GoPro V1 |

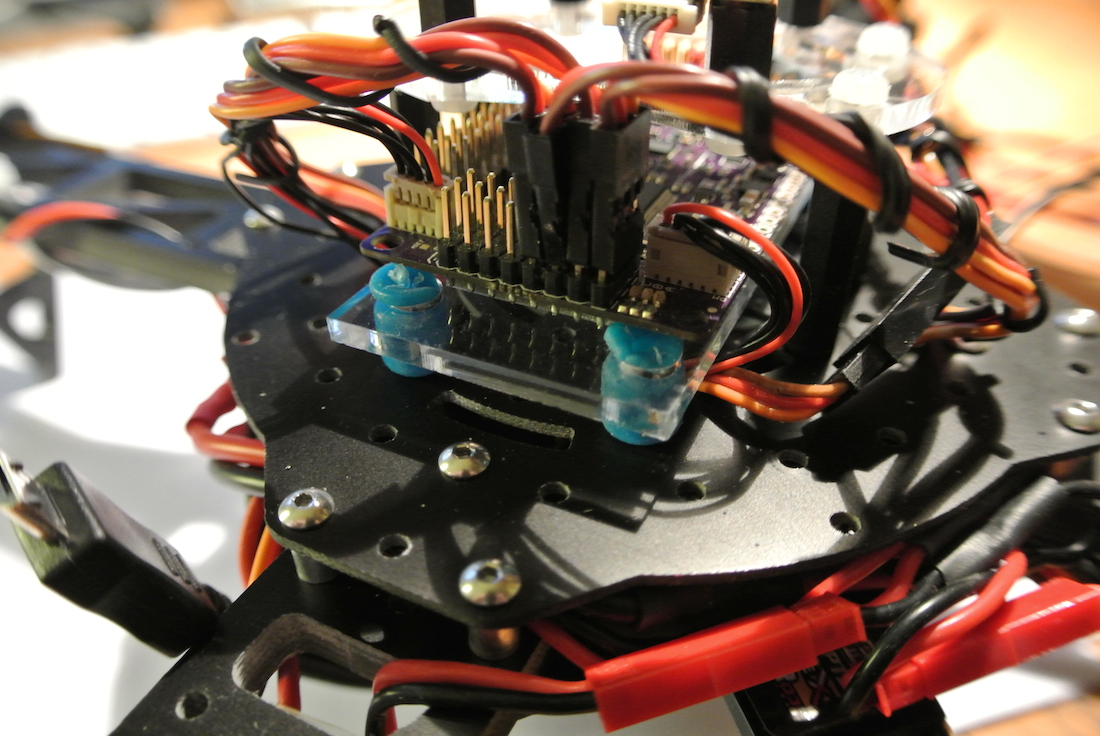
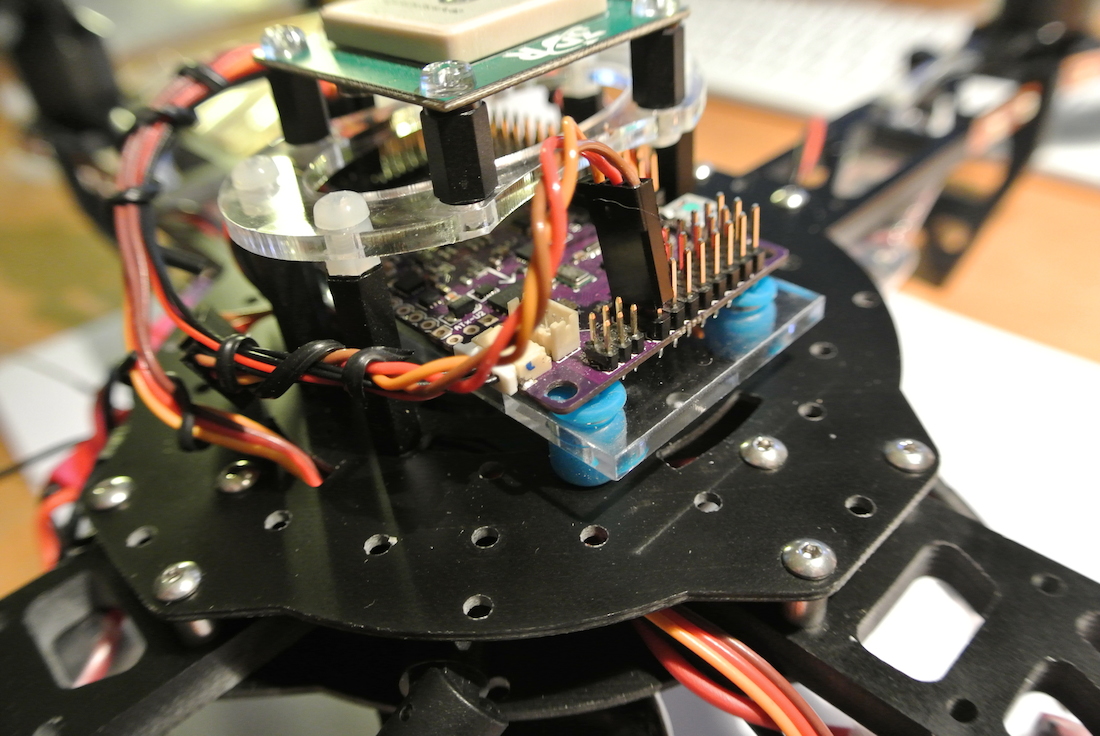
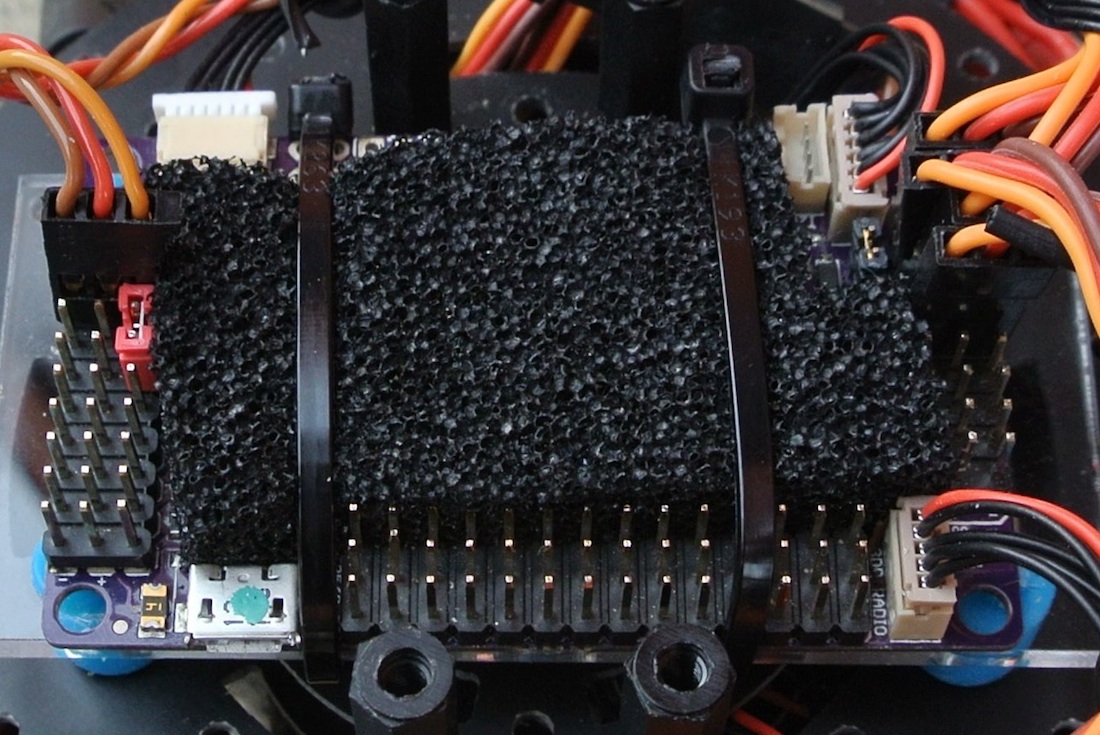
Artemis V1 vibration dampening
Artemis V1 vibration measurment
Measurments are okay. AccX and AccY are inside the limits of -5 and 5. AccZ is in side the -15 to -5 range.
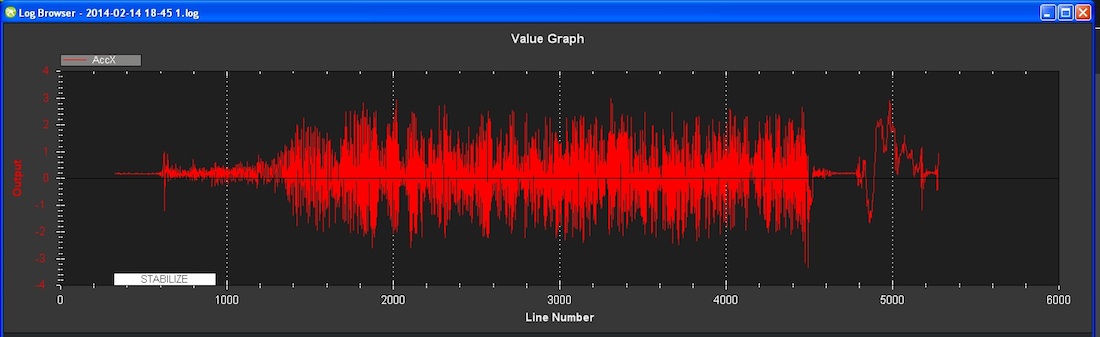
AccX (limits for good performance -5 and +5)
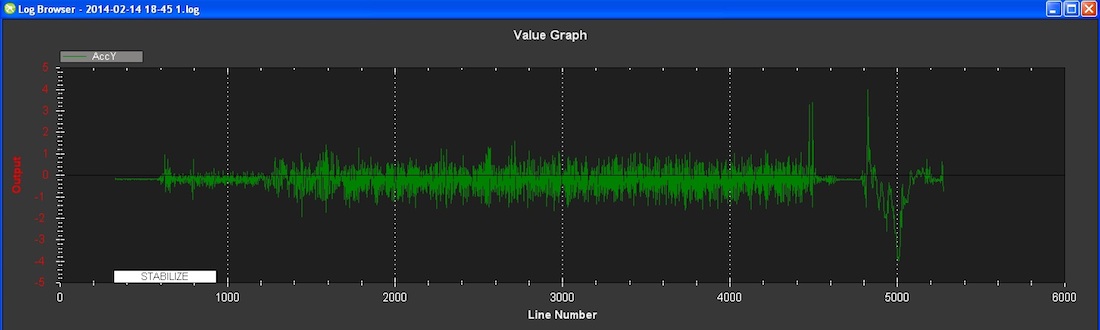
AccY (limits for good performance -5 and +5)
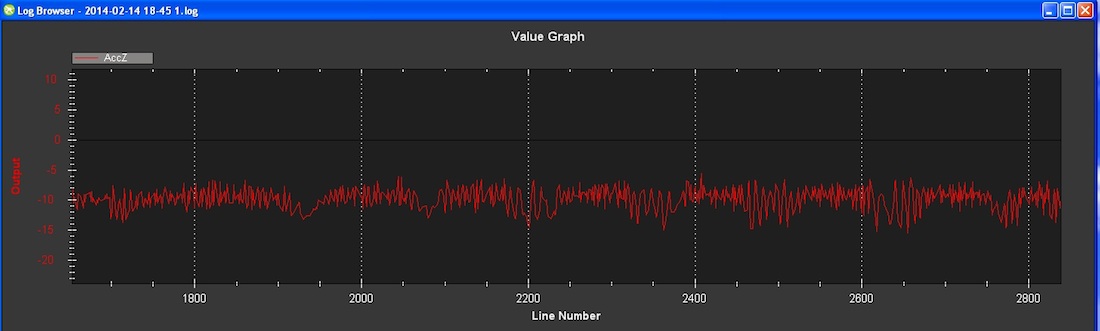
AccZ (limits for good performance -15 and -5)
Test Barometer
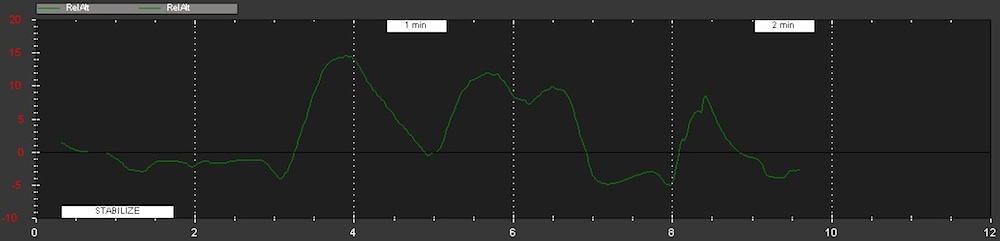
Measurments shows really bad values
Cover the barometer on the APM 2.5

Now measurments shows much better values. Alt-hod mode is working